
Tango-s与Romer关节臂的完美结合
文章摘要:tango-s与RA7机器的完美结合=高效、准确地完成您日常的扫描、检测工作。
tango-s与RA7机器的完美结合=高效、准确地完成您日常的扫描、检测工作。
一、Tango-s手持式三维扫描仪
1、目标点自动定位
2、不需要额外机械臂或其他跟踪设备
3、采用多条线束激光来获取
4、物体表面的三维点云
突出的优点是:贴好标记点后可任意更换扫描角度和移动零件位置,光束多测量范围大,无测量死角对大面零件速度快
二、Romer关节臂测量机:
机器有底座固定,机器精度高对零件细节扫描更清晰,接触式测头能对基本特征进行准确测量。
三、基于各自的优点,在大型零件的扫描测量上能实现两者的完美结合
例如整车的测量:(先贴点)

1、第一种方法:
可以使用tango-s扫描设备把整车的标记点扫描下来,输出标记点文件后,手持扫描设备和RA7设备可同时工作,那么RA7设备如何跟手持设备的坐标对齐是关键。
用测量软件打开标记点文件

可在需要标记点的圈内画十字线找出中心点,然后RA7关节臂上用针式测头,直接用蛙跳的方式,测量至少3个点,即完成坐标的统一。
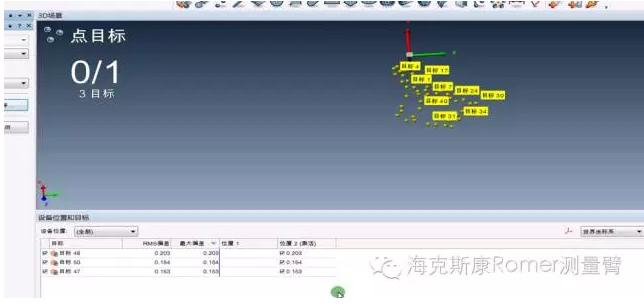
此方法最快速,但是坐标系误差稍大,坐标系统一的误差大致为0.2mm左右;如果精度能满足需要,即可实现快速坐标对接;对接后,RA7关节臂即可进行基本孔位等元素的接触式测量,也可以进行曲面或更精细部位的扫描。实现与tango-s的统一。
2、第二种方法:
可在车身上贴标准球的方法,tango-s扫描标记点和标准球,
然后在把点云数据输出,polyworks软件打开点云数据,把扫描球的数据拟合为球特征,然后RA7机器选择用球的方式蛙跳,找到tango-s机器的坐标系,由于要扫描和拟合球等操作速度上比第一种稍慢,但定位精度高,可实现较高精度的测量;坐标系的对齐后RA7机器即可扫描或特征的测量,最后实现2台设备的共同在统一基准下工作。

注:经作者授权,同意转载。
获取更多精彩内容,请关注公众号。
著作权归作者所有,若转载请联系作者获取授权。智能创客 zn.daxiao.cc


共0条评论
最新评论